MÁY KIỂM TRA ĐỘ BỀN KÉO ĐỨT CÁP

MÁY KIỂM TRA ĐỘ BỀN KÉO ĐỨT CÁP
HƯỚNG DẪN SỬ DỤNG MÁY KIỂM TRA ĐỘ BỀN KÉO ĐỨT CÁP
Thận trọng khi vận hành
Chú ý:
Vui lòng đọc kỹ sách hướng dẫn sử dụng trước khi mở bao bì, lắp đặt hoặc vận hành thiết bị. Đặc biệt chú ý đến tất cả các hướng dẫn liên quan đến nguy hiểm và thận trọng. Nếu không, có thể gây thương tích nghiêm trọng cho người vận hành và làm hỏng thiết bị. Để đảm bảo rằng thiết bị không bị hư hỏng , không được lắp đặt hoặc vận hành thiết bị theo bất kỳ cách nào không được mô tả trong sách hướng dẫn này.
•
Khoảng thời gian giữa mỗi lần tắt máy và khởi động máy phải lớn hơn 5 giây, tức là tắt nguồn máy chính giữa quá trình và đợi ít nhất 5 giây trước khi khởi động tiếp.
•
Khi điều chỉnh không gian thử nghiệm với con trượt di chuyển tốc độ cao trong điều kiện không tải, hãy chú ý đến khoảng cách giữa hai đầu kẹp. Khi khoảng cách nhỏ phải giảm tốc độ di chuyển, nếu không cảm biến có thể bị hỏng.
•
Kiểm tra tình trạng của công tắc dừng khẩn cấp, nhấn để chuyển sang trạng thái dừng khẩn cấp, xoay theo chiều kim đồng hồ (bật lên) sang trạng thái chuyển động và công tắc dừng khẩn cấp phải ở trạng thái hoạt động trước khi thử nghiệm.
•
Chọn đúng loại kẹp và không làm kẹp bị quá tải.
•
Trong trường hợp mất điện, hãy tắt tất cả nguồn điện ngay lập tức và bật máy sau khi nguồn điện ổn định.
•
Không rời vị trí sau khi máy chạy. Nếu rời đi, bạn phải cắt nguồn điện hoặc nhấn công tắc dừng khẩn cấp.
•
Chú ý an toàn khi thử nghiệm vật liệu giòn cứng, đặc biệt khi nén vật liệu giòn cứng, thực hiện các biện pháp bảo vệ an toàn để mẫu thử không bị gãy và bắn ra ngoài gây thương tích cho người.
•
Trong trường hợp quá tải, cấm không được xoay cần xoay nhanh mà phải dỡ từ từ.
•
Khi thiết bị được hiệu chuẩn và kiểm tra, cần điều chỉnh con trượt trên thanh giới hạn đến vị trí đủ để bảo vệ thiết bị hiệu chuẩn, để bảo vệ an toàn cho thiết bị và dụng cụ hiệu chuẩn.
•
Trong trường hợp khẩn cấp, hãy nhấn công tắc dừng khẩn cấp nhanh nhất có thể, sau đó giải quyết sự cố.
1. Lắp đặt thiết bị
1.1 Các điều kiện lắp đặt thiết bị
1.1.1 Các yêu cầu về môi trường
•
Nhiệt độ trong khoảng 15-35 ℃, và dao động không lớn hơn
2 ℃ / giờ
•
Độ ẩm tương đối 25% - 75%
•
Không va đập và rung;
•
Không có môi trường ăn mòn xung quanh;
•
Phải dành không gian bảo trì không nhỏ hơn 0,7m;
1.1.2 Các yêu cầu về điện
•
Không bị nhiễu điện từ;
•
Điện áp phải nằm trong khoảng một pha 220V ± 10%, 50Hz / 60Hz;
•
Nguồn điện tối thiểu phải là 2,2kW và cầu dao tối thiểu phải là 16A;
•
Người dùng chuẩn bị ổ cắm điện, cần ít nhất ba ổ cắm, một ổ dùng cho máy chính và hai ổ còn lại cắm với máy tính.
1.2 Lắp đặt máy chính
Động cơ chính của máy thử phải được đặt trên mặt đất bằng phẳng, theo phương ngang. Dụng cụ đo độ ngang bằng sử dụng nước có thể được đặt ở mặt trên của bàn thử động cơ chính để kiểm tra hướng trước, sau và trái và phải của động cơ chính, và độ ngang bằng không được lớn hơn 0,2/1000. Sau khi được đặt vào vị trí, nó sẽ được cố định bằng bu lông neo.
Vị trí lắp đặt của máy:
1.
Khoảng cách tâm ngang giữa lỗ bu lông trên máy chính và đầu cố định là 24405mm, có thể đảm bảo khoảng cách kéo của cáp quang là 25m.
2.
Có thể bố trí 6 giá nối đất giữa động cơ chính và đầu cố định.
3.
Người dùng có thể điều chỉnh thanh chéo và ống cuộn trên khung nối đất tùy theo vị trí của cáp quang.
Kích thước cài đặt như trong hình:

Sau khi lắp đặt như trong sơ đồ đấu nối cáp chính, có thể đấu nối dây thông tin và dây điện. Vị trí nối được thể hiện trong hình bên dưới.

Sơ đồ đấu nối cáp chính
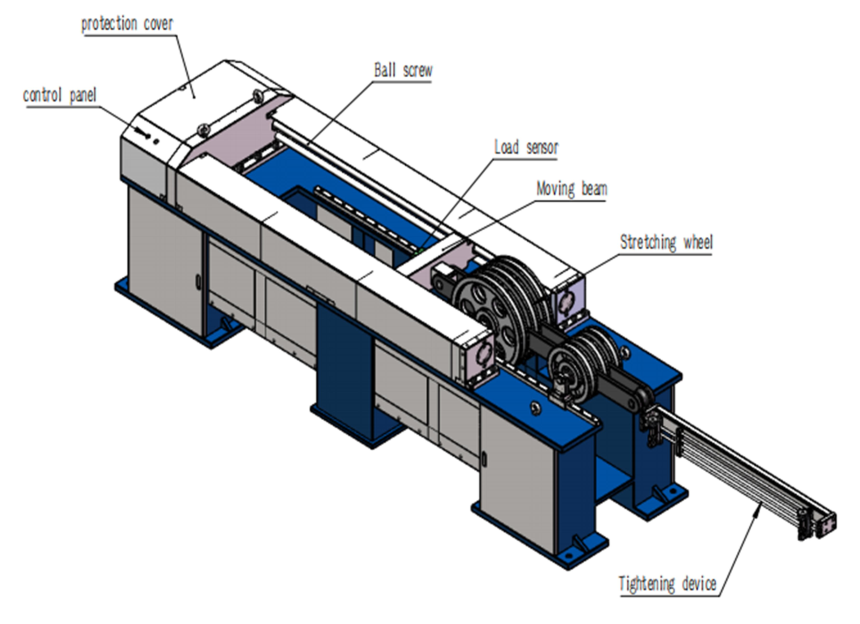
2. Giới thiệu về các cấu kiện của thiết bị

Mô tả chức năng cấu kiện
·
Vỏ bảo vệ: Bảo vệ các bộ phận bên trong;
·
Bánh xoay kéo căng: để cuộn dây cáp quang và tạo lực căng trong quá trình thử nghiệm;
·
Cảm biến tải: phần tử cảm biến để kiểm tra giá trị tải;
·
Bảng điều khiển: khởi động, đóng và dừng khẩn cấp máy thử;
·
Dầm động: điều chỉnh không gian thử nghiệm;
·
Vít me: thiết bị truyền động;
·
Thiết bị siết: dùng để siết chặt mẫu cáp quang.
2.1.1 Thiết bị đo độ biến dạng

Mô tả chức năng:
-
Kẹp biến dạng trái: Dùng để kẹp đầu cáp quang bên trái;
-
Kẹp biến dạng phải: Dùng để kẹp đầu cáp quang bên phải;
-
Thanh chỉnh thước đo: Dùng để điều chỉnh khoảng cách thang đo. Khoảng cách thang đo của thiết bị đo này là 1000mm;
-
Trục quang dẫn hướng: Dẫn hướng trục quang di chuyển bằng kẹp biến dạng trái và phải;
-
Cảm biến dịch chuyển: Thành phần đo độ biến dạng của cáp quang;
-
Thanh chỉnh độ nén: Dùng để điều chỉnh độ nén trước của cảm biến dịch chuyển.
2.1.2 Giá đỡ cáp quang
Khi giá đỡ cáp quang được sử dụng để lắp và quấn mẫu cáp quang, cáp quang được đỡ bằng giá đỡ, vít kẹp được nới lỏng và có thể điều chỉnh chiều cao của giá đỡ bằng cách di chuyển ống điều chỉnh. Có bốn bộ giá đỡ cáp quang, được đặt đều giữa thiết bị căng của máy chính và thiết bị cố định đế trong quá trình lắp đặt.

2.1.3 Thiết bị cố định ụ đỡ
Thiết bị cố định ụ đỡ là một cơ cấu cố định cả hai đầu của cáp quang. Cáp quang kéo từ bánh xe quấn được quấn ít nhất hai lần vào bánh cố định trước và sau, sau đó được kẹp bằng các kẹp tương ứng.

3. Quy trình thử nghiệm bình thường
3.1 Trình tự khởi động thiết bị
Bước 1: Kiểm tra xem nút dừng khẩn cấp trên bàn điều khiển đã được nhả chưa.
Bước 2: Kiểm tra xem từng vị trí giới hạn cơ có chính xác và ở tình trạng tốt hay không.
Bước 3: Khởi động máy tính và vào hệ điều hành windows.
Bước 4: Bật công tắc nguồn của máy thử.
Bước 5: Khởi động bộ điều khiển.
Bước 6: Bắt đầu quy trình thử nghiệm.
Bước 7: Chọn mục thử nghiệm và vào cửa sổ thử nghiệm.
Bước 8: Khởi động servo và kiểm tra xem động cơ servo có hoạt động bình thường không.
Bước 9: Kiểm tra xem màn hình hiển thị dữ liệu tải và dịch chuyển của bộ điều khiển có bình thường không.
Bước 10: Kiểm tra xem giá trị vị trí và giá trị thang đo có tương ứng nhau không, nếu không, hãy điều chỉnh vị trí hiện tại để tránh thử nghiệm thất bại do kích hoạt giới hạn mềm.
Bước 11: kiểm tra xem chuyển động không tải có bình thường không và việc thu thập dữ liệu cảm biến có nhạy không.
3.2 Trình tự tắt thiết bị
Bước 1: Nhấp vào nút "turn of servo" trên thanh công cụ vận hành chung để tắt động cơ servo, hoặc tắt động cơ servo từ bộ điều khiển;
Bước 2: Thoát khỏi chương trình thử nghiệm và tắt máy tính;
Bước 3: Tắt bộ điều khiển.
Bước 4: Tắt công tắc nguồn của máy thử.
3.3 Tiến hành thử nghiệm
Bước 1: Điều chỉnh thiết bị truyền động hoặc bàn thử đến vị trí thích hợp;
Bước 2: Điều chỉnh không tải;
Bước 3: Lắp đặt mẫu;
Bước 4: Lắp thiết bị đo biến dạng lớn;
Bước 5: Nhập tên tệp;
Bước 6: Khởi động đầu ra tương tự;
Bước 7: Nhấp vào nút "start test" trên thanh công cụ tiêu chuẩn;
Bước 8: Sau khi thử nghiệm, trước tiên loại bỏ biến dạng lớn, và sau đó loại bỏ mẫu thử;
Bước 9: Nhấp vào báo cáo thử nghiệm để duyệt hoặc in báo cáo thử nghiệm.
3.4 Kết thúc thử nghiệm
Người dùng có thể nhấp vào nút "terminate test" trên thanh công cụ vận hành thử nghiệm bất kỳ lúc nào theo yêu cầu để kết thúc thử nghiệm.
Trong quá trình thử nghiệm, khi nhấp vào kết thúc thử nghiệm sẽ bật lên một hộp thoại để yêu cầu người dùng xác nhận thao tác kết thúc. Khi người dùng đưa ra lệnh kết thúc, nếu thử nghiệm đã ở giai đoạn bắt đầu chính thức, chương trình sẽ tính toán kết quả thử nghiệm, nhưng trạng thái thử nghiệm sẽ được ghi lại là "người dùng kết thúc thử nghiệm".
Đối với thử nghiệm do người dùng kết thúc, dữ liệu thử nghiệm do phần mềm tính toán có thể không chính xác.
Nếu người dùng cho rằng thử nghiệm kết thúc không hợp lệ và cần được hủy bỏ, người dùng có thể sử dụng chức năng xóa dữ liệu và thử nghiệm trong menu bật lên bằng cách nhấp chuột phải để xóa thử nghiệm đã kết thúc.
4. Xử lý bất thường trong quá trình thử nghiệm
Hãy nhớ! Nếu phát hiện thiết bị có sự bất thường, hãy nhấn nút dừng khẩn cấp ngay lập tức!
4.1 Bất thường trong thử nghiệm
-
Báo động bảo vệ giới hạn mềm
- Báo động bảo vệ giới hạn cơ
-
Báo động dừng khẩn cấp
-
Báo động quá tải thiết bị
4.2 Nguyên nhân, hiện tượng và cách xử lý bất thường trong quá trình thử nghiệm
4.2.1 Báo động bảo vệ giới hạn mềm
·
Nguyên nhân:
Nếu vị trí của bàn thử nghiệm vượt quá phạm vi giới hạn mềm trên và dưới, chức năng bảo vệ giới hạn mềm của bộ điều khiển sẽ khởi động.
·
Hiện tượng bất thường:
Trong trường hợp dừng khẩn cấp máy thử, động cơ điện sẽ không bị cắt. Bạn chỉ có thể di chuyển theo hướng ngược lại.
·
Phương pháp xử lý:
Kiểm tra xem giá trị của thang đo có phù hợp với giá trị vị trí bên trong của bộ điều khiển hay không;
Nếu có sự sai lệch đáng kể giữa hai giá trị này, hãy điều chỉnh giá trị vị trí bộ điều khiển trong phạm vi giới hạn mềm.
Nếu độ lệch giữa hai giá trị này là rất nhỏ, hãy kiểm tra các giá trị cài đặt giới hạn mềm trên và dưới. Phạm vi giới hạn mềm trên và dưới có thể quá hẹp. Vui lòng mở rộng các giá trị cài đặt phạm vi giới hạn mềm trên và dưới một cách thích hợp.
Trước khi thử nghiệm, hãy kiểm tra giá trị thang đo và giá trị vị trí bên trong của bộ điều khiển, điều này có thể tránh được cảnh báo giới hạn mềm trên và dưới một cách hiệu quả.
4.2.2 Báo động bảo vệ giới hạn cơ
·
Nguyên nhân:
Nếu vị trí của bàn thử nghiệm quá cao hoặc quá thấp, công tắc hành trình sẽ được kích hoạt, chức năng bảo vệ giới hạn cơ sẽ bắt đầu.
·
Hiện tượng bất thường:
Trong trường hợp dừng máy khẩn cấp, động cơ điện hoặc bơm dầu trợ lực sẽ tự động bị cắt. Trạng thái kích hoạt giới hạn cơ không thể khởi động động cơ điện hoặc bơm dầu trợ lực.
·
Phương pháp xử lý:
Trước khi khởi động máy thử, loại bỏ giới hạn cơ, sau đó khởi động máy thử để điều chỉnh vị trí của piston xylanh dầu, rồi đặt giới hạn cơ về vị trí ban đầu.
Nếu không dễ loại bỏ giới hạn cơ, trong điều kiện đảm bảo an toàn của thiết bị, trước hết có thể tắt giới hạn cơ, sau đó có thể khởi động động cơ điện, có thể di chuyển bàn thử nghiệm ra khỏi giới hạn cơ, và khi đó có thể kích hoạt chức năng giới hạn cơ.
Kiểm tra để đảm bảo rằng công tắc hành trình hoạt động bình thường trở lại, sau đó khởi động máy bơm dầu trợ lực hoặc servo.
Ở trạng thái bình thường, không được phép tắt chức năng giới hạn cơ khi chưa được phép!
4.2.3 Báo động quá tải thiết bị
·
Nguyên nhân:
Khi khả năng chịu tải của thiết bị vượt quá giới hạn quy định và giá trị tải vượt quá phạm vi của cảm biến tải, bảo vệ quá tải được khởi động.
·
Hiện tượng bất thường:
Trong trường hợp dừng máy khẩn cấp, động cơ điện sẽ tự động bị cắt. Không thể khởi động động cơ điện khi giá trị tải không thấp hơn phạm vi giá trị cảm biến tải.
·
Phương pháp xử lý:
Quan sát sự thay đổi của giá trị tải và phân tích nguyên nhân gây quá tải.
Nếu giá trị tải có thể tự giảm và giá trị tải tương đương nằm trong phạm vi của cảm biến thì người dùng có thể tự xử lý.
Nếu giá trị tải không thể tự giảm thì người dùng phải thông báo cho kỹ sư dịch vụ kỹ thuật của nhà sản xuất về tình trạng thiết bị, điều kiện thử nghiệm và quy trình vận hành, và xử lý đúng cách dưới sự hướng dẫn của kỹ sư.
Khi có sự chấp thuận của kỹ sư dịch vụ kỹ thuật, trước tiên có thể tháo bảo vệ quá tải của cảm biến và có thể khởi động servo hoặc bơm dầu để không tải. Trong quá trình dỡ tải, phải chú ý đến hướng và tốc độ chậm để tránh làm hư hỏng thiết bị hoặc sự cố mở rộng thêm. Sau khi dỡ tải, bảo vệ quá tải của cảm biến có thể được bổ sung kịp thời.
Nếu kỹ sư dịch vụ kỹ thuật cho rằng việc khởi động servo hoặc bơm dầu để dỡ tải là không phù hợp, trước tiên phải ngắt nguồn điện của máy hoặc chụp ảnh công tắc dừng khẩn cấp của thiết bị, sau đó nới lỏng thiết bị cố định của máy. Quá trình nới lỏng phải chậm, và phải quan sả giá trị tải bất kỳ lúc nào và quá trình nới lỏng phải an toàn. Sau khi dỡ tải, tháo mẫu thử hoặc kẹp, sau đó cố định cảm biến tải như ban đầu. Trong quá trình cố định, phải chú ý đến độ đối xứng và độ kín để không ảnh hưởng đến độ nhạy và độ chính xác số của cảm biến.
Sau khi xử lý quá tải thiết bị, tháo mẫu thử hoặc kẹp, quan sát bề ngoài của cảm biến tải xem có bị biến dạng nghiêm trọng không và cảm biến áp suất tay có nhạy để quan sát giá trị tải không, nếu không cảm biến có thể bị hỏng, và cần phải báo cho nhà sản xuất để sửa chữa.
Hãy cẩn thận
Nghiêm cấm xử lý quá tải thiết bị mà không có sự hướng dẫn của kỹ sư dịch vụ kỹ thuật của nhà sản xuất và phải trao đổi với kỹ sư dịch vụ kỹ thuật trong quá trình này.
Không được phép cố tình che giấu thông tin chi tiết về thao tác để đánh lừa kỹ sư, vì có thể dẫn đến hư hỏng thiết bị hoặc hoặc làm sự cố trầm trọng thêm!
Cấm tháo bảo vệ quá tải của cảm biến trong điều kiện bình thường!
Cấm va chạm ở tốc độ cao mà không giữ mẫu trong bộ phận cố định, vì có thể gây hư hỏng thiết bị hoặc cảm biến!
Khi giá trị lực tiếp cận giới hạn phạm vi cảm biến, hãy giảm tốc độ tải chậm lại. Tải tốc độ cao có thể gây hỏng cảm biến hoặc thiết bị!
4.3 Xử lý dữ liệu thử nghiệm sau khi phát hiện bất thường
Phần mềm sẽ tự động kết thúc thử nghiệm.
Phần mềm sẽ tính toán kết quả thử nghiệm dựa trên dữ liệu được thu thập hiện tại, nhưng các điều kiện thử nghiệm sẽ được ghi lại dưới dạng ngoại lệ.
Kết quả thử nghiệm được tính toán có thể không chính xác sau khi thử nghiệm có sự bất thường.
Nếu người dùng cho rằng bài thử nghiệm không hợp lệ, người dùng có thể sử dụng chức năng xóa dữ liệu và đường cong thử nghiệm trong menu bật lên bằng cách nhấp chuột phải để xóa thử nghiệm không hợp lệ đó.
5. Bảo trì
·
Thêm dầu bôi trơn vào các bộ phận trượt, bôi dầu chống rỉ vào các bộ phận dễ bị rỉ sét, thay nhớt sau hộp giảm tốc hoạt động được 300h, thay dầu sau 2500h, vệ sinh và tra dầu cho vít chì cứ 3 tháng 1 lần.
·
Ngăn ngừa nhiệt độ cao, độ ẩm quá cao, bụi, môi trường ăn mòn và nước xâm nhập vào máy.
·
Kiểm tra định kỳ mỗi năm một lần.
·
Luôn giữ sạch sẽ để tránh các bộ phận bị gỉ.
·
Ghi lại việc sử dụng.
6. Khắc phục sự cố
Khi không thể di chuyển con trượt của thiết bị, hãy kiểm tra và loại trừ các nguyên nhân sau:
·
Kiểm tra xem phích cắm điện có được cắm đúng cách hay nguồn điện bị thiếu pha hay không.
·
Kiểm tra xem bộ bảo vệ ngắt mạch có bị ngắt không (trên bảng phân phối trong đế máy).
·
Kiểm tra xem công tắc dừng khẩn cấp có bật không.
·
Kiểm tra xem chức năng kickout đang hoạt động không.
·
Mở nắp sau của đế máy, quan sát thông tin lỗi được hiển thị bởi trình điều khiển servo và loại bỏ lỗi theo thông tin lỗi;
7. Di chuyển máy
Đầu kéo của máy khoảng 120kg, và đầu cố định khoảng 110kg. Phải nâng và di chuyển máy nhẹ nhàng trong quá trình dịch chuyển. Nghiêm cấm lật ngược máy khi di chuyển để tránh làm hỏng máy. Đồng thời, không được tác động lực lên nắp bảo vệ của máy chính trong quá trình thao tác để tránh hư hỏng.
8. Dịch vụ sau bán hàng
·
Thời gian bảo hành của máy là một năm, với dịch vụ ưu đãi trọn đời.
·
Cung cấp nhiều loại vật cố định và khuôn mẫu, các tùy chọn chức năng mở rộng.
·
Hỗ trợ người dùng phát triển các dự án thử nghiệm mới.
·
Miễn phí nâng cấp phần mềm (không bao gồm phần cứng được hỗ trợ).
·
Trong trường hợp hệ thống gặp sự cố, liên hệ ngay với nhà máy để được khắc phục sự cố kịp thời.
9. Phụ lục
9.1 Các chỉ số cơ học chính của sản phẩm
|
Kiểu máy |
ZYT-W1000 |
|
Kết cấu máy chính |
Theo phương ngang |
|
Lực thử nghiệm tối đa |
100kN |
|
Phạm vi đo tải |
(1% ~ 100%) tiêu chuẩn |
|
Độ chính xác tải |
±0.5% |
|
Phạm vi đo độ biến dạng |
0-50mm |
|
Độ chính xác của chỉ báo biến dạng |
±0.5% |
|
Độ biến dạng |
0.001mm |
|
Độ dịch chuyển |
0.000015mm |
|
Phạm vi điều chỉnh tỷ lệ dịch chuyển |
0.01 ~ 500mm/min |
|
Kéo dài kích thước bộ phận của động cơ chính |
3300mmx870mmx1080mm |
|
Kích thước của đầu cố định của ụ đỡ |
1300mmx950mmx1080mm |
|
Nguồn cấp |
AC220V±10% , 50Hz , 2KW |
|
Trọng lượng phần kéo dài của động cơ chính |
Khoảng 2180Kg |
|
Trọng lượng của đầu cố định của ụ đỡ |
Khoảng 1600kg |
9.2 Hiệu chuẩn cảm biến lực

•
Hiệu chuẩn cảm biến: Để hiệu chỉnh độ chính xác của cảm biến lực;
•
Giá đỡ cảm biến: Dùng để đỡ cảm biến, có thể điều chỉnh độ cao bằng đai ốc dưới tấm đỡ;
Bình luận